Bio-inspired multimodal learning withorganic neuromorphic electronics forbehavioral conditioning in robotics
A small-scale organic neuromorphic circuit adaptively processes multimodal sensory stimuli, enabling a robotic arm to avoid potentially dangerous objects.

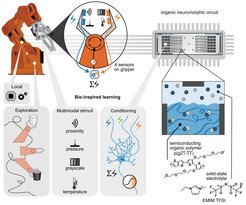
Biological systems interact directly with the environment and learn by receiving multimodal feedback via sensory stimuli that shape the formation of internal neuronal representations. Drawing inspiration from biological concepts such as exploration and sensory processing that eventually lead to behavioral conditioning, we present a robotic system handling objects through multimodal learning. A small-scale organic neuromorphic circuit locally integrates and adaptively processes multimodal sensory stimuli, enabling the robot to interact intelligently with its surroundings. The real-time handling of sensory stimuli via low-voltage organic neuromorphic devices with synaptic functionality forms multimodal associative connections that lead to behavioral conditioning, and thus the robot learns to avoid potentially dangerous objects. This work demonstrates that adaptive neuro-inspired circuitry with multifunctional organic materials, can accommodate locally efficient bioinspired learning for advancing intelligent robotics.











